- · 《计算机产品与流通》栏[06/28]
- · 《计算机产品与流通》收[06/28]
- · 《计算机产品与流通》投[06/28]
- · 《计算机产品与流通》征[06/28]
- · 《计算机产品与流通》刊[06/28]
一、稿件要求: 1、稿件内容应该是与某一计算机类具体产品紧密相关的新闻评论、购买体验、性能详析等文章。要求稿件论点中立,论述详实,能够对读者的购买起到指导作用。文章体裁不限,字数不限。 2、稿件建议采用纯文本格式(*.txt)。如果是文本文件,请注明插图位置。插图应清晰可辨,可保存为*.jpg、*.gif格式。如使用word等编辑的文本,建议不要将图片直接嵌在word文件中,而将插图另存,并注明插图位置。 3、如果用电子邮件投稿,最好压缩后发送。 4、请使用中文的标点符号。例如句号为。而不是.。 5、来稿请注明作者署名(真实姓名、笔名)、详细地址、邮编、联系电话、E-mail地址等,以便联系。 6、我们保留对稿件的增删权。 7、我们对有一稿多投、剽窃或抄袭行为者,将保留追究由此引起的法律、经济责任的权利。 二、投稿方式: 1、 请使用电子邮件方式投递稿件。 2、 编译的稿件,请注明出处并附带原文。 3、 请按稿件内容投递到相关编辑信箱 三、稿件著作权: 1、 投稿人保证其向我方所投之作品是其本人或与他人合作创作之成果,或对所投作品拥有合法的著作权,无第三人对其作品提出可成立之权利主张。 2、 投稿人保证向我方所投之稿件,尚未在任何媒体上发表。 3、 投稿人保证其作品不含有违反宪法、法律及损害社会公共利益之内容。 4、 投稿人向我方所投之作品不得同时向第三方投送,即不允许一稿多投。若投稿人有违反该款约定的行为,则我方有权不向投稿人支付报酬。但我方在收到投稿人所投作品10日内未作出采用通知的除外。 5、 投稿人授予我方享有作品专有使用权的方式包括但不限于:通过网络向公众传播、复制、摘编、表演、播放、展览、发行、摄制电影、电视、录像制品、录制录音制品、制作数字化制品、改编、翻译、注释、编辑,以及出版、许可其他媒体、网站及单位转载、摘编、播放、录制、翻译、注释、编辑、改编、摄制。 6、 投稿人委托我方声明,未经我方许可,任何网站、媒体、组织不得转载、摘编其作品。
同盾科技与同济大学合作论文被国际顶级盛会A
作者:网站采编关键词:
摘要:近日,同盾科技人工智能研究院与同济大学软件学院张林教授等合作的论文《多传感器数据融合的语义SLAM系统》被2020年国际顶级盛会ACM Multimedia(以下简称:ACM MM)录用。 ACM,即国际计算
近日,同盾科技人工智能研究院与同济大学软件学院张林教授等合作的论文《多传感器数据融合的语义SLAM系统》被2020年国际顶级盛会ACM Multimedia(以下简称:ACM MM)录用。
ACM,即国际计算机学会(Association for Computing Machinery ),是世界上最大的计算机领域专业性学术组织,其评选的图灵奖(A.M. Turing Award)被公认为世界计算机领域的诺贝尔奖;而ACM MM被认为是多媒体技术领域奥运级别的顶级盛会,也是中国计算机学会推荐的多媒体领域唯一的A类国际学术会议,来自全球的各类机构都在会议上分享、交流最新研究成果。

本次被ACM MM录用的论文的题目为“多传感器数据融合的语义SLAM系统( A Tightly-coupled Semantic SLAM System with Visual, Inertial and Surround-view Sensors for Autonomous Indoor Parking )”。多传感器数据融合是指采用计算机技术对按时间序列获得的多传感器观测数据,进行分析和使用,进而实现智能决策和评估,是一个新兴的研究领域,也是一门实践性较强的应用技术,是多学科交叉的新技术。
同盾科技合伙人兼人工智能研究院院长、美国佛罗里达大学终身教授李晓林表示,本文提出的VISSLAM深度集成多传感器来自动构造地图,极大提高了定位精度,可以支撑自主泊车及无人车的管理和自动充电,也可以为机器人和自动仓储等场景添上语义眼睛,应用前景广阔。
同济大学软件学院张林教授表示,高精度建图与定位技术为自主移动机器人、无人车、无人机等智能体进行自主导航与定位提供了底层保障,是此类系统的核心模块。此次课题组研发的SLAM系统是针对室内自主泊车任务而设计的,为推动自主泊车系统的落地应用提供了有效技术支撑。
近年来,多传感器数据融合技术无论在军事还是民事领域的应用都极为广泛,比如机器人、自动驾驶、交通管制、医疗诊断等领域。在自动驾驶领域,室内自主泊车就是一个非常典型的应用场景,需要多传感数据融合。
要在室内停车环境中自主泊车,需要感测和理解周围环境,通常可以利用SLAM系统,分析车辆运动情况并绘制环境地图。SLAM系统的基本传感器配置包括单目和双目摄像机。将摄像机和IMU(惯性测量单位)结合在一起可以防止导航过程中的跟踪损失,一般称作VI-SLAM(视觉惯性SLAM)系统。VI-SLAM系统通常依赖于低级视觉特征(例如点和线),而在室内停车环境中,此类特征并不稳定,会导致目标消失,比如,在遇到纹理比较少的墙时。而且,此类SLAM系统并没有理解周围环境的语义信息。
要充分了解周围环境, SLAM系统需要融合语义信息以实现精准定位和绘制地图。而在停车过程中,常规的语义对象(如汽车和人)是动态的,对定位和绘制地图没有太多帮助。相比之下,在室内停车场景中,地面上的停车位则是一种稳定且显著的语义特征。目前的语义SLAM系统还很少融合利用停车位信息。
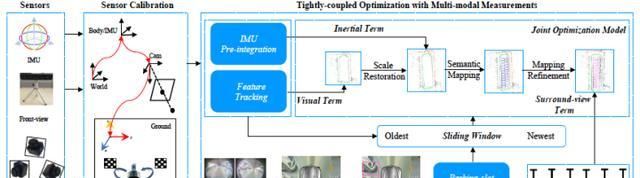
针对实际应用中存在的问题,本文提出了一个语义SLAM系统,即VISSLAM,集成了视觉、惯性导航单元和环视传感器,用于室内自主泊车。本文主要贡献包括:
首先,VISSLAM是目前国际上首次提出的深度融合了环视传感器信息的语义SLAM系统。环视传感器包括四台鱼眼相机,根据采集的信息可以在线合成出相应的俯视图。

同时,VISSLAM框架中融合了停车位信息,将它们建模为邻接项和配准项来构造语义地图,大大提高了定位精度。该系统可以轻松集成到高级自主泊车系统中。此外,本文还提供了一个大型数据集,包含了室内停车场的多传感器数据,在某种程度上弥补了这一领域标准集的空白。这将有利于多传感器数据融合研究,尤其是自主泊车的研究。
据了解,同盾科技近年来在人工智能领域不断探索,设立人工智能研究院,并以人工智能研究院为核心载体,稳步推动人工智能战略的布局和实施。目前。团队参与国家科技创新2030\"新一代人工智能\"重大项目,取得多项专利成果,并深度参与国家部委、央行等发起的行业标准制定,并与浙江大学、西北工业大学等多个高校,以及建设银行、招联金融等多家金融机构共建联合实验室。
此外,在技术的普及和规范上,同盾人工智能研究院最近参与了中国信通院相关标准的制定:《基于联邦学习的数据流通产品 技术要求与测试方法》标准第一版的制定,《基于可信执行环境的数据计算平台 技术要求与测试方法》标准第一版的制定,和《基于多方安全计算的数据流通产品 技术要求和测试方法》标准第二版的修订。
文章来源:《计算机产品与流通》 网址: http://www.jsjcpylt.cn/zonghexinwen/2020/0825/456.html
上一篇:拍卖师必考知识第十章第十一章
下一篇:山西省原平市加速农村电商消费升级